
Difference between revisions of "Motors"
Alexalspach (Talk | contribs) |
Alexalspach (Talk | contribs) |
||
| Line 1: | Line 1: | ||
{{Motors}} | {{Motors}} | ||
| + | ==Gear Reduction== | ||
| + | {{Gear Reduction}} | ||
| − | + | ==Encoders== | |
| + | {{Encoders}} | ||
| − | |||
| − | |||
| − | |||
{{TODO}} | {{TODO}} | ||
Revision as of 18:28, 21 November 2013
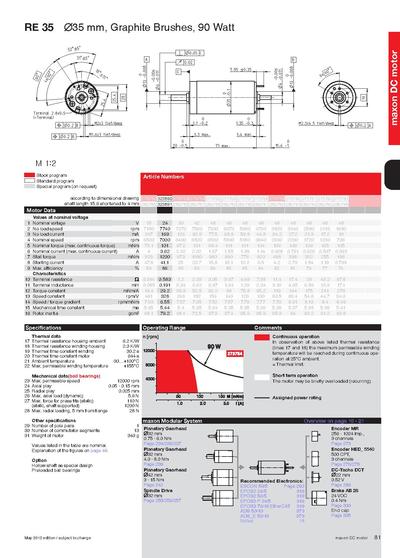
All twelve active joints use Maxon motors.
Maxon RE 35 ∅35 mm, Graphite Brushes, 90 Watt
Part number 323890
Contents |
Spec Sheet
Gear Reduction
All joints use Maxon 86:1 gear reduction boxes.
Maxon Planetary Gearhead GP 32 C, ∅32 mm, 1.0–6.0 Nm, Ceramic Version
Part number 166942
Spec Sheet

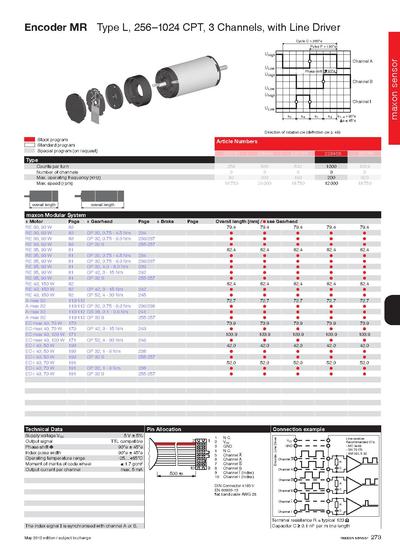
Encoders
The Allegro Dog uses Maxon Magneto-Resistant (MR) encoders.
Maxon Encoder MR, Type L, 1000 CPT, 3 Channels, with Line Driver
Part number 228456
Spec Sheet
TODO: Something!