
Difference between revisions of "Overview"
Alexalspach (Talk | contribs) (→Joint Limits) |
Alexalspach (Talk | contribs) (→Link and Joint Dimensions) |
||
| Line 51: | Line 51: | ||
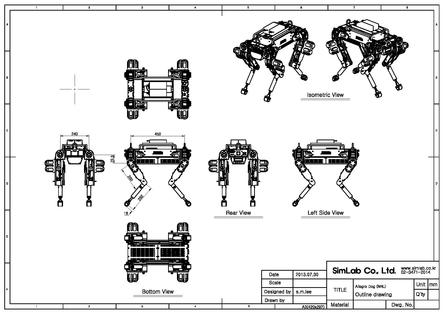
===Link and Joint Dimensions=== | ===Link and Joint Dimensions=== | ||
| − | {{ | + | {{pdf|Dimensions|444px}} |
| + | |||
| + | {{More Info}} [[Dimensions]], [[Joint Configuration]], [[Joint Directions]], [[Joint Coordinate Frames]] | ||
==Dynamic Information== | ==Dynamic Information== | ||
Revision as of 17:50, 25 November 2013
Contents |
Wiki Structure
The Allegro Dog Wiki is broken up into separate sections, or categories, to help in locating necessary information quickly and easily. Below you can see the top-level parent categories, the hierarchical structure and articles each category contains.
More Information: About this Wiki
Booting the Allegro Dog
Multiple steps must be taken to properly and safely boot up and run the Allegro Dog internal computer and hardware. The following instructions should be followed closely. If you need any help, please contact us.
Note Refer to the Control-I/O Panel diagram for switch, button and indicator locations.
- Elevate the Allegro Dog
- Supply Required Power (24VDC)
- Flip On Main Power Switch
- Turn Computer On
- Release Emergency Stop
- Turn Motor Controller Power On
- Establish Remote Connection
- Run the Included Software
- Find Encoder Offsets (Homing)
- Enable Motor Control
- Assume Ready Position
- Walk Around
Full Booting Instructions Control-I/O Panels
More Information: Full Booting Instructions, Control-I/O Panels
Software
The Allegro Dog comes pre-installed with SimLab's RoboticsLab™ and the RealtimeRobotics™ realtime add-on. This allows you develop Allegro Dog controllers and test them on the system in hard real time.
To facilitate the productivity of robotics researchers and engineers, RoboticsLab™ aims at providing systematic support for the whole spectrum of development from prototyping to the robust control of hardware systems. Every aspect of our software and its use has been examined from the viewpoint of the robotics engineer, greatly reducing the need for specialized knowledge in the low-level details.
RealtimeRobotics™ is a RoboticsLab™ Premium Add-on which implements a commercial RTOS-based real-time control framework for RoboticsLab™.
More Information: Software, RoboticsLab, RealtimeRobotics, Allegro Dog VS Project
Hardware
The hardware section of the Allegro Dog wiki includes mechanical and electrical system information as well as assembly and maintenance information.
More Information: Hardware
Component Overview
The drawings contained in this section point out the high-level components of the Allegro Dog.
More Information: Component Overview
Kinematic Information
Joint Limits
Each of the Allegro Dog's four legs have identical joint limits:
- Joint 0: -20˚ ~ +30˚
- Joint 1: ±90˚
- Joint 2: ±130˚
Warning These limits are hard mechanical limits. These limits should be avoided using software limits with a buffer region.
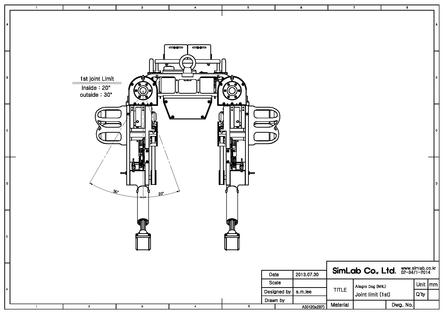
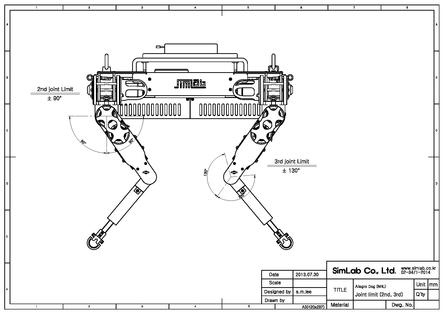
More Information: Joint Limits
Link and Joint Dimensions
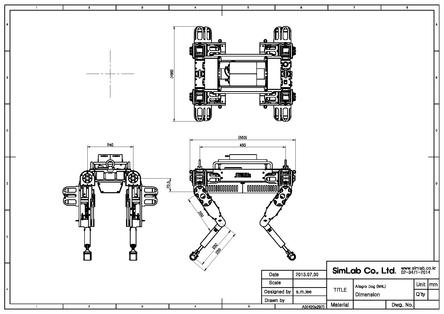
More Information: Dimensions, Joint Configuration, Joint Directions, Joint Coordinate Frames
Dynamic Information
Link Masses
Link COMs
Link Inertia
Joint Locking
Joints can be locked into a stable "kneeling" position for storage or shipping.
More Information: Joint Locking
Mechanical Drawings
More Information: Orthographic Drawings
Power
The external power port is used to supply external power or redirect battery power to the Allegro Dog. It accepts two separate 24V inputs: One input powers the power management system and the second powers the motor controllers and motors.
More Information: Power, Power Management System,
Power Management System
The Allegro Dog's power management system provides power to every Allegro Dog component. A 24V/A output powers the motor controllers and motors while a separate 24V/B line and 12 and 5V lines power the internal computer, IMU and any other devices added to the system. The power management system also limits the current supplied to the various devices and helps keep batteries healthy by limiting their drain.
Note When power is supplied to the power management system it will automatically turn on without any further action from the user. It is only powered off when the power supply is removed. Powering the internal computer and motor controllers requires further action.
More Information: Power Management System
Power Requirement
The Allegro Dog runs on 24VDC, and under normal conditions draws no more than 20 amps. The current required varies greatly with the algorithm and application. The dog can be powered via external power supplies or by multiple internal and external batteries.
Note When power is supplied to the power management system it will automatically turn on without any further action from the user. It is only powered off when the power supply is removed. Powering the internal computer and motor controllers requires further action.
Motor Controller Power
The motor controllers and motors are powered via the power management system's 24V/A output. Power to the motor controllers can be turned on using the Motor Controller/Motor Power Switch (No. 8 on the Control-I/O Panels) or the wireless remote.
More Information: Motor Controller Power
Internal Power Sources
Available directly off of the Allegro Dog's internal power management system are 24V/B, 12V and 5V internal power sources.
More Information: Internal Power Sources
Battery Power Management
While running on battery power, the battery voltage can be monitored using the LCD Panel Voltage Display on the rear of the dog. The power management system will also actively monitor the battery voltage and notify the user when the battery should be changed.
25.2 - 22.1V No sound - This is the normal operating voltage range.
22.0 - 20.6V Beep (pause) beep (pause)... - It is recommended you change the battery, but you have a few more minutes if necessary.
20.5 - 20.1V Beep beep beep beep... - You must change the battery immediately to avoid damage to the battery. The dog will soon shut down.
20.0 - 0.00V Beeeeeeeeeeeeep... - The power management system will shut down at 20V. Power to the everything is lost.
Note To keep the computer running while swapping batteries, switch just one battery at a time to ensure constant power to the power management system.
More Information: Battery Power
Charging
Batteries can be charged using the included battery charger. Look to the instructions included with the charger for how to properly charge your battery and keep them healthy.
Warning The batteries should never be discharged below 20V. The batteries are fully charged at 25.2V.
Computer
The Allegro Dog's internal computer is an Advantech MIO-5290 single board computer (SBC).
The Allegro Dog can be controlled in realtime using an external computer with RoboticsLab™ and RealtimeRobotics™ installed via CAN interface.
More Information: Internal Computer, External Computer
Specifications
CAN Communication
Maintenance
Certain aspects of the dogs, like belt tension and passive joint stiffness, should be carefully set and maintained.
- Belt Tensioning
- Belt tension can be adjusted using the motor shifting mechanisms on the legs of the dogs.
- Linear Joint Stiffness
- The stiffness of the passive linear joints can be adjusted using a bolt to compress or decompress internal springs.