|
|
| Line 15: |
Line 15: |
| | *[[Send PWM data]] : how to send data to Allegro Hand. | | *[[Send PWM data]] : how to send data to Allegro Hand. |
| | | | |
| − | ===main.cpp=== | + | ===build=== |
| − | You can find '''main.cpp''' in grasp directory. There are 3 functions you have to edit.
| + | |
| − | <br><br>
| + | |
| − | | + | |
| − | Initialize CAN I/O thread and start.
| + | |
| − | <syntaxhighlight lang="cpp">
| + | |
| − | // Open a CAN data channel
| + | |
| − | bool OpenCAN()
| + | |
| − | {
| + | |
| − | printf(">CAN(%d): open\n", CAN_Ch);
| + | |
| − | | + | |
| − | // CAN open
| + | |
| − | int ret = command_can_open(CAN_Ch);
| + | |
| − | if(ret < 0)
| + | |
| − | {
| + | |
| − | printf("ERROR command_can_open !!! \n");
| + | |
| − | return false;
| + | |
| − | }
| + | |
| − | | + | |
| − | // initialize CAN I/O thread
| + | |
| − | ioThreadRun = true;
| + | |
| − | pthread_create(&hThread, NULL, ioThreadProc, 0);
| + | |
| − | printf(">CAN: starts listening CAN frames\n");
| + | |
| − |
| + | |
| − | // set periodic communication parameters(period)
| + | |
| − | printf(">CAN: Comm period set\n");
| + | |
| − | short comm_period[3] = {3, 0, 0}; // millisecond {position, imu, temperature}
| + | |
| − | ret = command_set_period(CAN_Ch, comm_period);
| + | |
| − | if(ret < 0)
| + | |
| − | {
| + | |
| − | printf("ERROR command_set_period !!! \n");
| + | |
| − | command_can_close(CAN_Ch);
| + | |
| − | return false;
| + | |
| − | }
| + | |
| − | | + | |
| − | // servo on
| + | |
| − | printf(">CAN: servo on\n");
| + | |
| − | ret = command_servo_on(CAN_Ch);
| + | |
| − | if(ret < 0)
| + | |
| − | {
| + | |
| − | printf("ERROR command_servo_on !!! \n");
| + | |
| − | command_set_period(CAN_Ch, 0);
| + | |
| − | command_can_close(CAN_Ch);
| + | |
| − | return false;
| + | |
| − | }
| + | |
| − | | + | |
| − | return true;
| + | |
| − | }
| + | |
| − | </syntaxhighlight>
| + | |
| − | <br><br>
| + | |
| − | | + | |
| − | Get CAN raw data and identify data to get position values.
| + | |
| − | <syntaxhighlight lang="cpp">
| + | |
| − | // CAN communication thread
| + | |
| − | static void* ioThreadProc(void* inst)
| + | |
| − | {
| + | |
| − | int id;
| + | |
| − | int len;
| + | |
| − | unsigned char data[8];
| + | |
| − | unsigned char data_return = 0;
| + | |
| − | int i;
| + | |
| − | | + | |
| − | while (ioThreadRun)
| + | |
| − | {
| + | |
| − | /* wait for the event */
| + | |
| − | while (0 == get_message(CAN_Ch, &id, &len, data, FALSE))
| + | |
| − | {
| + | |
| − | switch (id)
| + | |
| − | {
| + | |
| − | case ID_RTR_FINGER_POSE_1:
| + | |
| − | case ID_RTR_FINGER_POSE_2:
| + | |
| − | case ID_RTR_FINGER_POSE_3:
| + | |
| − | case ID_RTR_FINGER_POSE_4:
| + | |
| − | {
| + | |
| − | int findex = (id & 0x00000007);
| + | |
| − | vars.enc_actual[findex*4 + 0] = (short)(data[0] | (data[1] << 8));
| + | |
| − | vars.enc_actual[findex*4 + 1] = (short)(data[2] | (data[3] << 8));
| + | |
| − | vars.enc_actual[findex*4 + 2] = (short)(data[4] | (data[5] << 8));
| + | |
| − | vars.enc_actual[findex*4 + 3] = (short)(data[6] | (data[7] << 8));
| + | |
| − |
| + | |
| − | // convert encoder count to joint angle
| + | |
| − | for (i=0; i<MAX_DOF; i++)
| + | |
| − | {
| + | |
| − | q[i] = (double)(vars.enc_actual[i])*(333.3/65536.0)*DEG2RAD;
| + | |
| − | }
| + | |
| − | | + | |
| − | // print joint angles
| + | |
| − | for (int i=0; i<4; i++)
| + | |
| − | {
| + | |
| − | printf(">CAN(%d): Joint[%d] Pos : %5.1f %5.1f %5.1f %5.1f\n"
| + | |
| − | , CAN_Ch, i, q[i*4+0]*RAD2DEG, q[i*4+1]*RAD2DEG, q[i*4+2]*RAD2DEG, q[i*4+3]*RAD2DEG);
| + | |
| − | }
| + | |
| − | break;
| + | |
| − | }
| + | |
| − |
| + | |
| − | default:
| + | |
| − | printf(">CAN(%d): unknown command %d, len %d\n", CAN_Ch, id, len);
| + | |
| − | }
| + | |
| − | }
| + | |
| − | }
| + | |
| − | return NULL;
| + | |
| − | }
| + | |
| − | </syntaxhighlight>
| + | |
| − | <br><br>
| + | |
| − | | + | |
| − | CloseCAN()
| + | |
| − | <syntaxhighlight lang="cpp">
| + | |
| − | // Close CAN data channel
| + | |
| − | void CloseCAN()
| + | |
| − | {
| + | |
| − | printf(">CAN: stop periodic communication\n");
| + | |
| − |
| + | |
| − | //close CAN listening thread
| + | |
| − | if (ioThreadRun)
| + | |
| − | {
| + | |
| − | printf(">CAN: stoped listening CAN frames\n");
| + | |
| − | ioThreadRun = false;
| + | |
| − | int status;
| + | |
| − | pthread_join(hThread, (void **)&status);
| + | |
| − | hThread = 0;
| + | |
| − | }
| + | |
| − | | + | |
| − | // CAN close
| + | |
| − | printf(">CAN(%d): close\n", CAN_Ch);
| + | |
| − | int ret = command_can_close(CAN_Ch);
| + | |
| − | if(ret < 0) printf("ERROR command_can_close !!! \n");
| + | |
| − | }
| + | |
| − | </syntaxhighlight>
| + | |
| − | <br><br>
| + | |
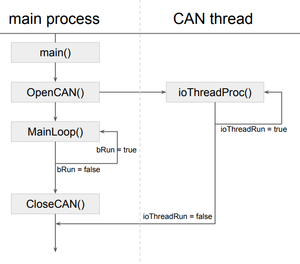
This tutorial will show how to open & close CAN communication. Also, how to get position data and send pwm to operate Allegro Hand. You will follow step by step with adding sample codes. Source code assumes you have a peak-systems pcan to usb adapter so if you are not using PEAK CAN device, please check your own device CAN api and channel.
Below picture shows a structure of a sample program for this tutorial.